Solids module that adds and manages the bodies of the system. More...
Functions/Subroutines | |
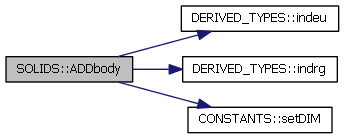
| subroutine, public | ADDbody (body, rg0, eu0) |
| Adds a body to the model. | |
| subroutine, public | ADDmassgeom (body, mass, rg_loc, v_Ig) |
| Subroutine to add mass, center of masses and inertia tensor with respect to the center of mass to a body. | |
| REAL(8), public | MatTrans (body) |
Function to calculate the transformation matrix of a body ![$ {\bf A}^* =\left[\begin{array}{c c} {\bf R} & {\bf p}_0 \\ {\bf 0} & 1 \end{array}\right] $](form_70.png) . . | |
| REAL(8), dimension(3), public | r (body, pt_loc) |
| Function to evaluate the global position of a point belonging to a body. | |
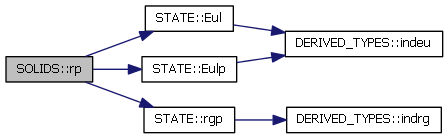
| REAL(8), dimension(3), public | rp (body, pt_loc) |
| Function to evaluate the global velocity of a point belonging to a body. | |
| REAL(8), dimension(3), public | v (body, vc_loc) |
| Function to evaluate the global coordinates of a vector belonging to a body. | |
| REAL(8), dimension(3), public | vp (body, vc_loc) |
| Function to evaluate the global velocity of a vector belonging to a body. | |
| REAL(8), dimension(3), public | rloc (body, pt_glob) |
| Function to evaluate the local position of a global point as belonging to a body. | |
| REAL(8), dimension(3) | vloc (body, vc_glob) |
| Function to evaluate the local coordinates of a global vector as belonging to a body. | |
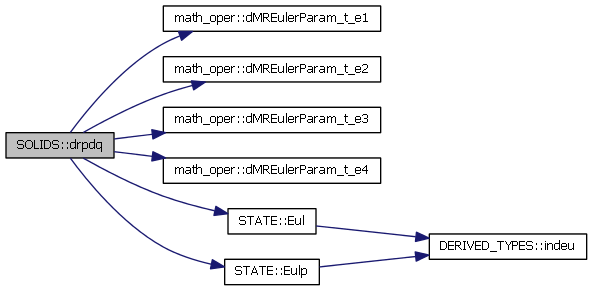
| REAL(8), dimension(3, 7), public | drdq (body, pt_loc) |
| Function to evaluate the derivative of the position of a point belonging to a body wrt to the generalized coordinates of the body. | |
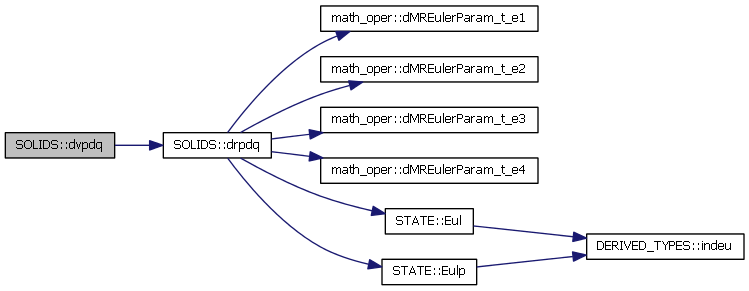
| REAL(8), dimension(3, 7), public | dvdq (body, vc_loc) |
| Function to evaluate the derivative of the position of a vector belonging to a body wrt to the generalized coordinates of the body. | |
| REAL(8), dimension(3, 7), public | drpdq (body, pt_loc) |
| Function to evaluate the derivative of the velocity of a point belonging to a body wrt to the generalized coordinates of the body. | |
| REAL(8), dimension(3, 7), public | dvpdq (body, vc_loc) |
| Function to evaluate the derivative of the velocity of a vector belonging to a body wrt to the generalized coordinates of the body. | |
| REAL(8), dimension(3, 7), public | drpdqp (body, pt_loc) |
| Function to evaluate the derivative of the velocity of a point belonging to a body wrt to the generalized coordinates of the body. | |
| REAL(8), dimension(3, 7), public | dvpdqp (body, vc_loc) |
| Function to evaluate the derivative of the velocity of a point belonging to a body wrt to the generalized coordinates of the body. | |
Variables | |
| TYPE(SOLID), dimension(:), allocatable, public | PROTECTED |
| TYPE(SOLID), dimension(:), allocatable, public | SOLIDlist |
| INTEGER, parameter, public | ground = 0 |
| INTEGER, public | nSOLID = 0 |
Detailed Description
Solids module that adds and manages the bodies of the system.
This module:
1)Adds bodies to the model.
2)Adds mass, center of mass and intertia tensor to the existing bodies.
3)Manages the creation of the vector of variables of the model
Function/Subroutine Documentation
| subroutine,public SOLIDS::ADDbody | ( | INTEGER,intent(out) | body, |
| REAL(8),dimension(3) | rg0, | ||
| REAL(8),dimension(4) | eu0 | ||
| ) |
Adds a body to the model.
- Parameters:
-
body output variable that stores the id of the body. The user should keep it unchanged for future requests to the library. rg0 initial guess for the coordinates of the center of mass of the body eu0 initial guess for the Euler parameters of the body
| subroutine,public SOLIDS::ADDmassgeom | ( | INTEGER,intent(in) | body, |
| REAL(8),intent(in) | mass, | ||
| REAL(8),dimension(3),intent(in) | rg_loc, | ||
| REAL(8),dimension(6),intent(in) | v_Ig | ||
| ) |
Subroutine to add mass, center of masses and inertia tensor with respect to the center of mass to a body.
- Parameters:
-
body body involved. mass value of the mass. rg_loc center of mass of the body in the local reference frame of the body. v_Ig components of the inertia tensor in the local reference frame of the body, with respect to its center of mass, given in the compact form: ![$ {\bf I}_g =\left[\begin{array}{c c c c c c} I_x & I_y & I_z & P_{xy} & P_{xz} & P_{yz}\end{array}\right] $](form_69.png)
| REAL(8),dimension(3,7),public SOLIDS::drdq | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc | ||
| ) |
Function to evaluate the derivative of the position of a point belonging to a body wrt to the generalized coordinates of the body.
- Parameters:
-
body body involved. pt_loc local coordinates of the point.

| REAL(8),dimension(3,7),public SOLIDS::drpdq | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc | ||
| ) |
Function to evaluate the derivative of the velocity of a point belonging to a body wrt to the generalized coordinates of the body.
- Parameters:
-
body body involved. pt_loc local coordinates of the point.
| REAL(8),dimension(3,7),public SOLIDS::drpdqp | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc | ||
| ) |
Function to evaluate the derivative of the velocity of a point belonging to a body wrt to the generalized coordinates of the body.
- Parameters:
-
body body involved. pt_loc local coordinates of the point.

| REAL(8),dimension(3,7),public SOLIDS::dvdq | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | vc_loc | ||
| ) |
Function to evaluate the derivative of the position of a vector belonging to a body wrt to the generalized coordinates of the body.
- Parameters:
-
body body involved. vc_loc local coordinates of the vector.

| REAL(8),dimension(3,7),public SOLIDS::dvpdq | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | vc_loc | ||
| ) |
Function to evaluate the derivative of the velocity of a vector belonging to a body wrt to the generalized coordinates of the body.
- Parameters:
-
body body involved. vc_loc local coordinates of the vector.
| REAL(8),dimension(3,7),public SOLIDS::dvpdqp | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | vc_loc | ||
| ) |
Function to evaluate the derivative of the velocity of a point belonging to a body wrt to the generalized coordinates of the body.
- Parameters:
-
body body involved. pt_loc local coordinates of the point.

| REAL(8),public SOLIDS::MatTrans | ( | INTEGER,intent(in) | body | ) |
Function to calculate the transformation matrix of a body .
- Parameters:
-
body body involved.

| REAL(8),dimension(3),public SOLIDS::r | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc | ||
| ) |
Function to evaluate the global position of a point belonging to a body.
- Parameters:
-
body body involved. pt_loc local coordinates of the point.

| REAL(8),dimension(3),public SOLIDS::rloc | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_glob | ||
| ) |
Function to evaluate the local position of a global point as belonging to a body.
- Parameters:
-
body body involved. pt_glob global coordinates of the point.

| REAL(8),dimension(3),public SOLIDS::rp | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc | ||
| ) |
Function to evaluate the global velocity of a point belonging to a body.
- Parameters:
-
body body involved. pt_loc local coordinates of the point.
| REAL(8),dimension(3),public SOLIDS::v | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | vc_loc | ||
| ) |
Function to evaluate the global coordinates of a vector belonging to a body.
- Parameters:
-
body body involved. vc_loc local coordinates of the vector.

| REAL(8),dimension(3) SOLIDS::vloc | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | vc_glob | ||
| ) |
Function to evaluate the local coordinates of a global vector as belonging to a body.
- Parameters:
-
body body involved. vc_glob global coordinates of the vector.

| REAL(8),dimension(3),public SOLIDS::vp | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | vc_loc | ||
| ) |
Function to evaluate the global velocity of a vector belonging to a body.
- Parameters:
-
body body involved. vc_loc local coordinates of the vector.
Variable Documentation
| INTEGER,parameter,public SOLIDS::ground = 0 |
| INTEGER,public SOLIDS::nSOLID = 0 |
| INTEGER,dimension(:),allocatable,public SOLIDS::PROTECTED |
| TYPE(SOLID),dimension(:),allocatable,public SOLIDS::SOLIDlist |
