Functions/Subroutines | |
| subroutine | force (t, n, F, p, Q) |
| Function to get the generalized force of one body when torque, force and Euler parameters of this body are given. | |
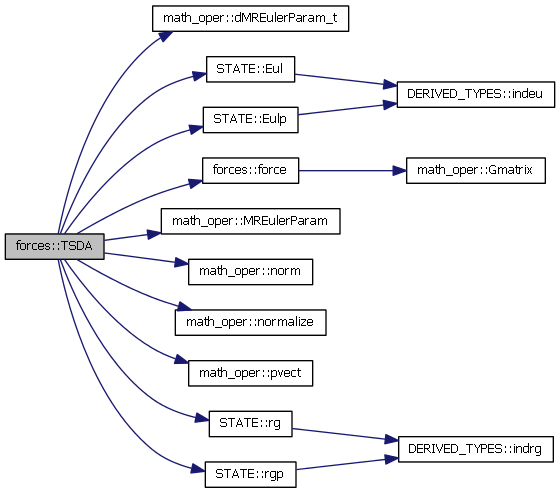
| subroutine | TSDA (t, body1, body2, pt1, pt2, s0, k, c, Q1, Q2) |
| Function to get the generalized forces of a translational spring-damper-actuator between acting on two bodies. | |
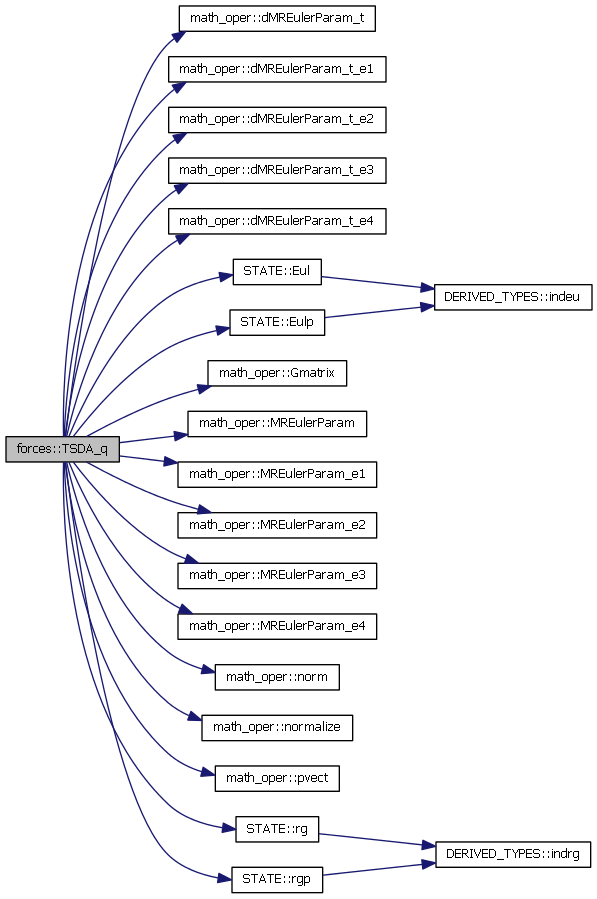
| subroutine | TSDA_q (t, body1, body2, pt1, pt2, s0, k, c, Q1, Q2) |
| Function to get the generalized stiffness of a translational spring-damper-actuator between acting on two bodies. | |
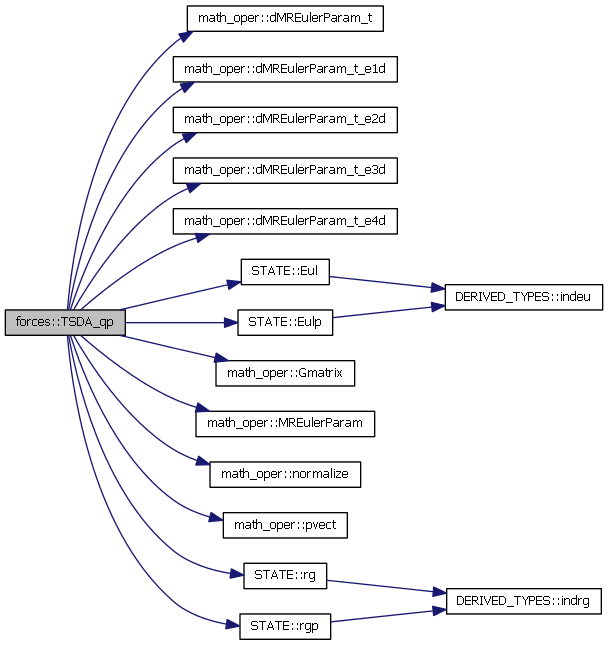
| subroutine | TSDA_qp (t, body1, body2, pt1, pt2, s0, k, c, Q1, Q2) |
| Function to get the generalized damping of a translational spring-damper-actuator between acting on two bodies. | |
Function/Subroutine Documentation
| subroutine forces::force | ( | REAL(8) | t, |
| REAL(8),dimension(3) | n, | ||
| REAL(8),dimension(3) | F, | ||
| REAL(8),dimension(4) | p, | ||
| REAL(8),dimension(7) | Q | ||
| ) |
Function to get the generalized force of one body when torque, force and Euler parameters of this body are given.
- Parameters:
-
t time. n torque act on the given body. F force act on the given body. P Euler parameters of the given body. Q Euler parameters of the given body.
Here is the call graph for this function:

| subroutine forces::TSDA | ( | real(8),intent(in) | t, |
| integer,intent(in) | body1, | ||
| integer,intent(in) | body2, | ||
| real(8),dimension(3),intent(in) | pt1, | ||
| real(8),dimension(3),intent(in) | pt2, | ||
| real(8),intent(in) | s0, | ||
| real(8),intent(in) | k, | ||
| real(8),intent(in) | c, | ||
| real(8),dimension(7),intent(out) | Q1, | ||
| real(8),dimension(7),intent(out) | Q2 | ||
| ) |
Function to get the generalized forces of a translational spring-damper-actuator between acting on two bodies.
- Parameters:
-
t time. body1 the first body involved. body2 the second body involved. pt1 point in the first body given in the body reference frame pt2 point in the second body given in the body reference frame s0 the unstreched length of the spring k the stiffness of the spring c the damping ratio of the damper Q1 return the generalized force acting on the first body Q2 return the generalized force acting on the second body
Here is the call graph for this function:
| subroutine forces::TSDA_q | ( | real(8),intent(in) | t, |
| integer,intent(in) | body1, | ||
| integer,intent(in) | body2, | ||
| real(8),dimension(3),intent(in) | pt1, | ||
| real(8),dimension(3),intent(in) | pt2, | ||
| real(8),intent(in) | s0, | ||
| real(8),intent(in) | k, | ||
| real(8),intent(in) | c, | ||
| real(8),dimension(7,7),intent(out) | Q1, | ||
| real(8),dimension(7,7),intent(out) | Q2 | ||
| ) |
Function to get the generalized stiffness of a translational spring-damper-actuator between acting on two bodies.
- Parameters:
-
t time. body1 the first body involved. body2 the second body involved. pt1 point in the first body given in the body reference frame pt2 point in the second body given in the body reference frame s0 the unstreched length of the spring k the stiffness of the spring c the damping ratio of the damper Q1 return the generalized stiffness acting on the first body Q2 return the generalized stiffness acting on the second body
Here is the call graph for this function:
| subroutine forces::TSDA_qp | ( | real(8),intent(in) | t, |
| integer,intent(in) | body1, | ||
| integer,intent(in) | body2, | ||
| real(8),dimension(3),intent(in) | pt1, | ||
| real(8),dimension(3),intent(in) | pt2, | ||
| real(8),intent(in) | s0, | ||
| real(8),intent(in) | k, | ||
| real(8),intent(in) | c, | ||
| real(8),dimension(7,7),intent(out) | Q1, | ||
| real(8),dimension(7,7),intent(out) | Q2 | ||
| ) |
Function to get the generalized damping of a translational spring-damper-actuator between acting on two bodies.
- Parameters:
-
t time. body1 the first body involved. body2 the second body involved. pt1 point in the first body given in the body reference frame pt2 point in the second body given in the body reference frame s0 the unstreched length of the spring k the stiffness of the spring c the damping ratio of the damper Q1 return the generalized damping acting on the first body Q2 return the generalized damping acting on the second body
Here is the call graph for this function: