Dynamic simulation module. More...
Functions/Subroutines | |
| subroutine | Acceleration_penalty (t) |
| Subrutine that solves the equations of motion for the acceleration using penalty (Partially taken from MBSLIM) | |
| subroutine | Penalty_fun (NVAR, t, y, yp) |
| subroutine | Penalty_Tang (N, T, Y, Fy) |
| subroutine | Model_Setup_Dynamics |
| Subroutine to set up the dynamics. | |
Detailed Description
Dynamic simulation module.
Function/Subroutine Documentation
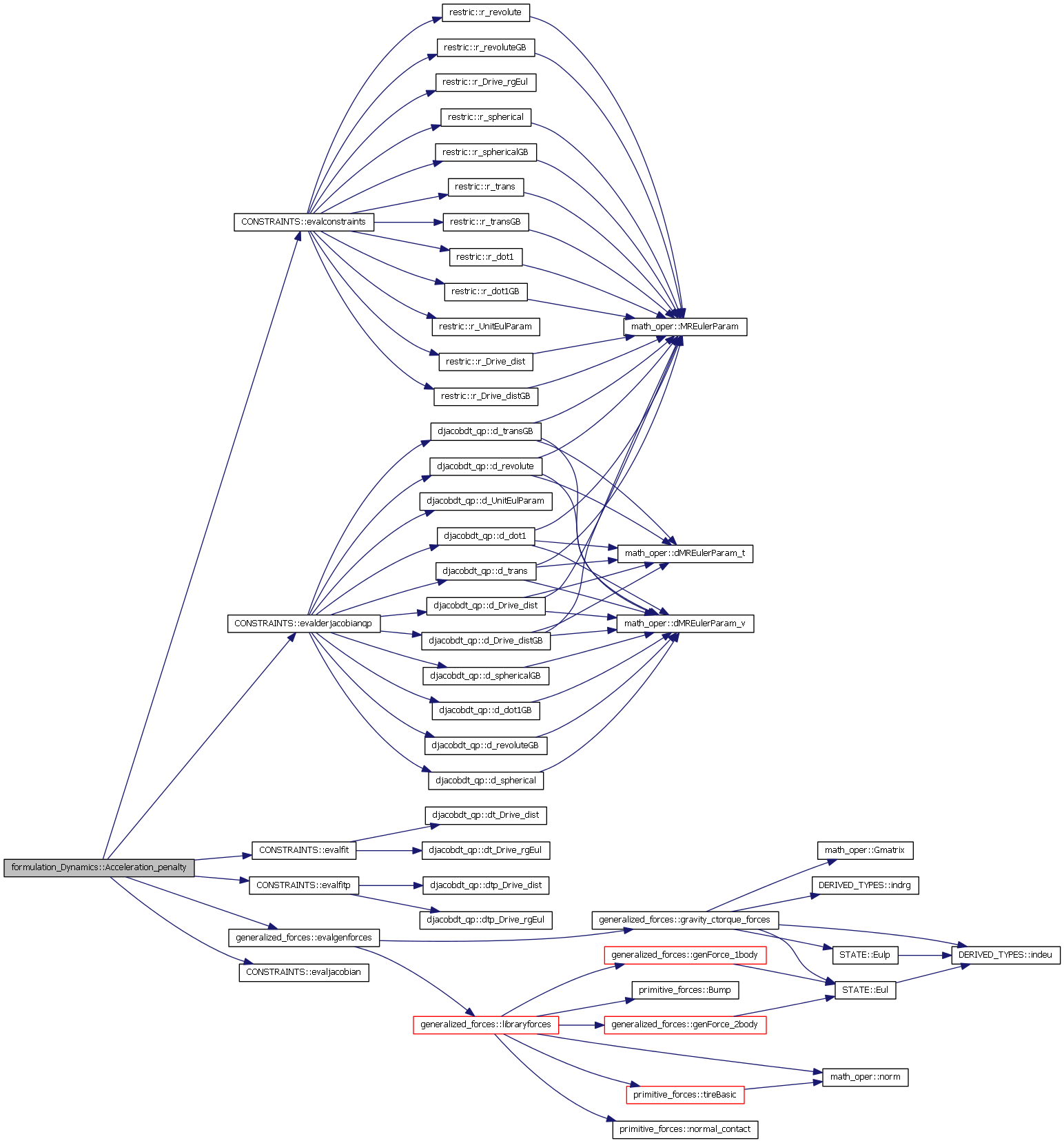
| subroutine formulation_Dynamics::Acceleration_penalty | ( | REAL(8),intent(in) | t | ) |
Subrutine that solves the equations of motion for the acceleration using penalty (Partially taken from MBSLIM)
Here is the call graph for this function:
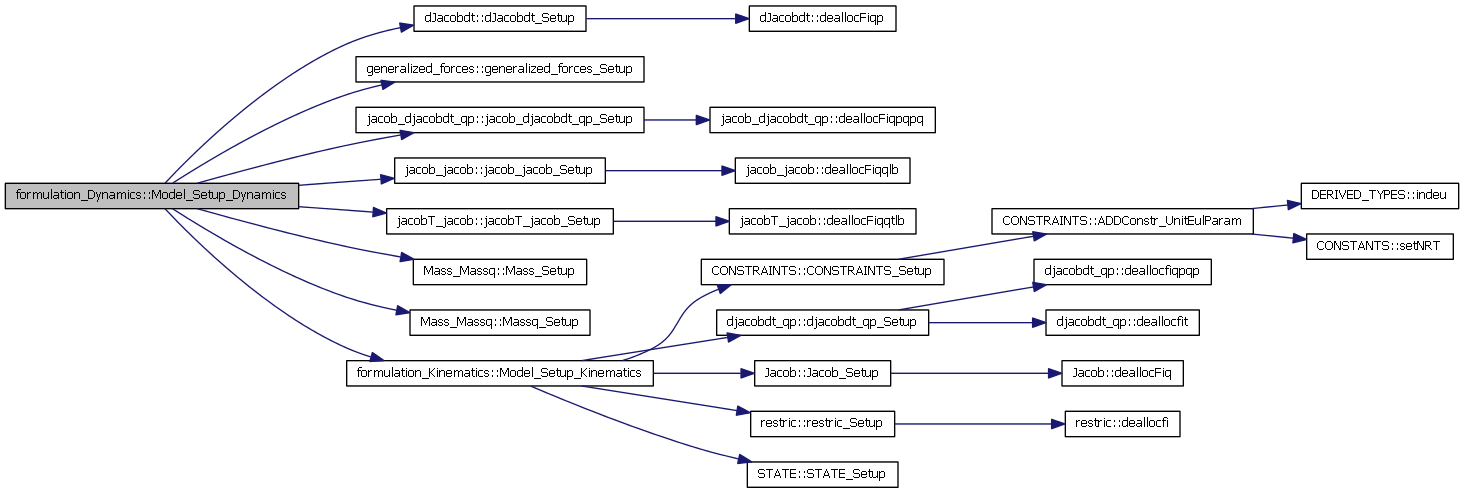
| subroutine formulation_Dynamics::Model_Setup_Dynamics | ( | ) |
Subroutine to set up the dynamics.
Here is the call graph for this function:
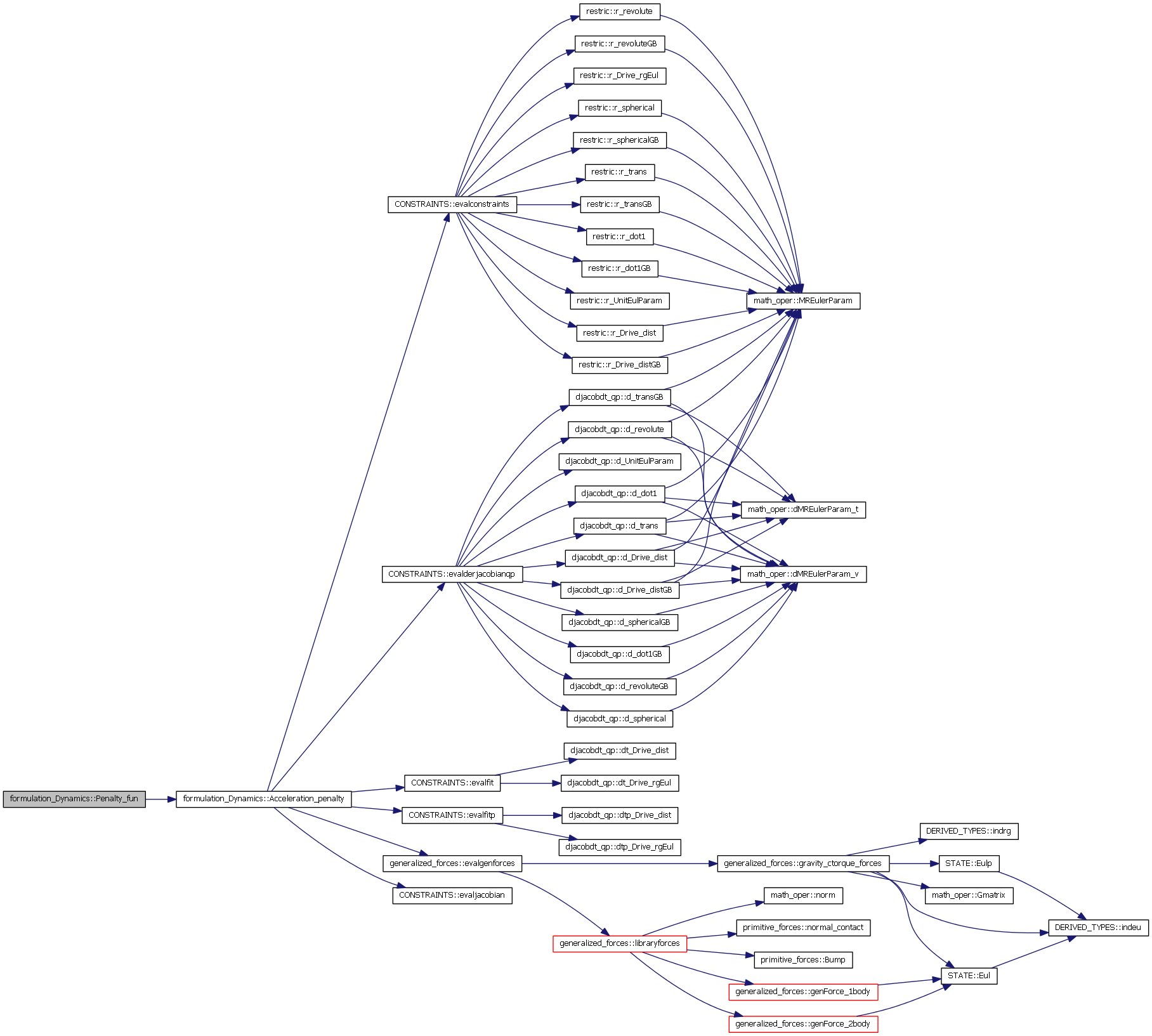
| subroutine formulation_Dynamics::Penalty_fun | ( | INTEGER,intent(in) | NVAR, |
| REAL(8),intent(in) | t, | ||
| REAL(8),dimension(nvar) | y, | ||
| REAL(8),dimension(nvar) | yp | ||
| ) |
Here is the call graph for this function:
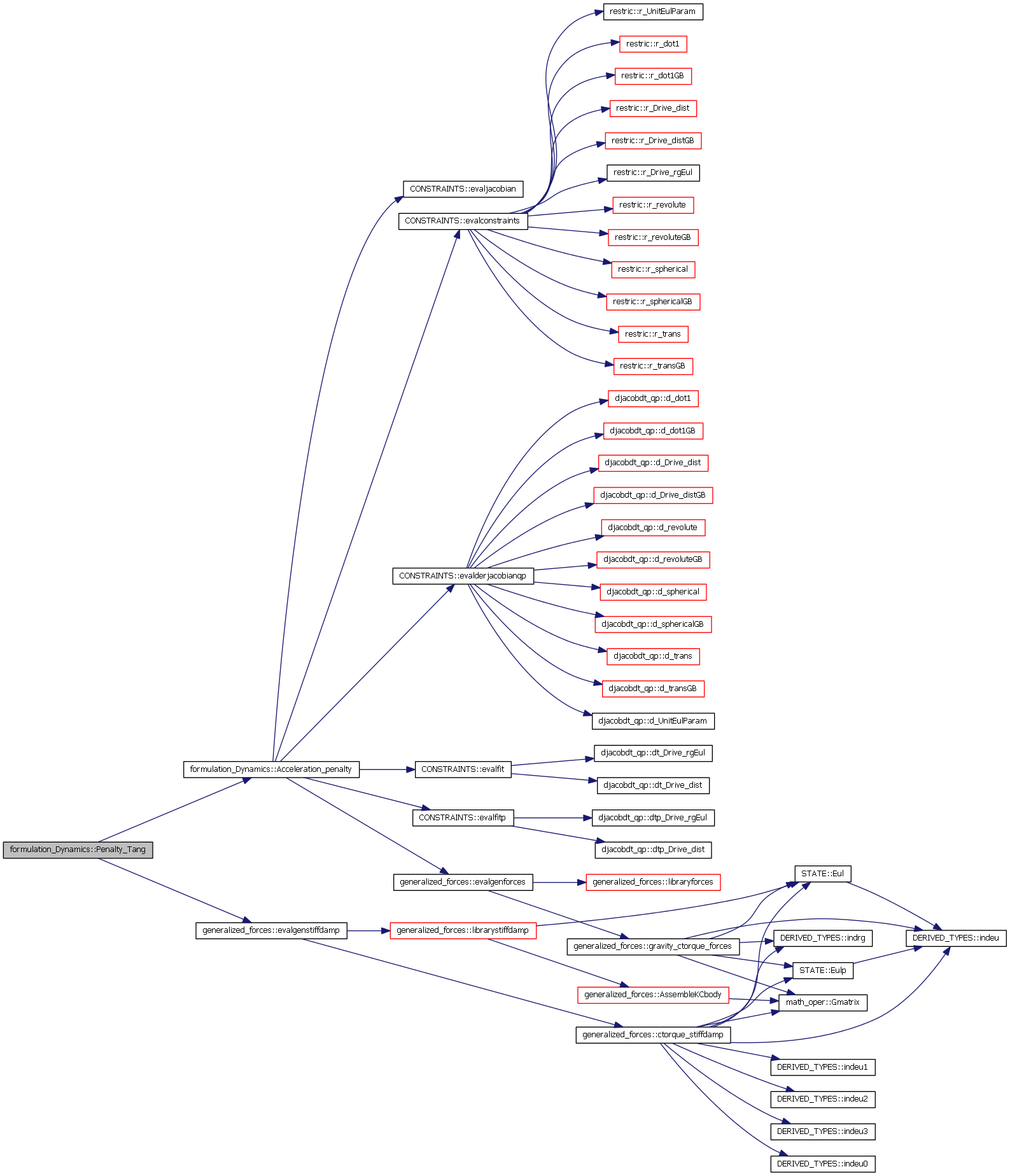
| subroutine formulation_Dynamics::Penalty_Tang | ( | integer,intent(in) | N, |
| DOUBLE PRECISION,intent(in) | T, | ||
| DOUBLE PRECISION,dimension(n),intent(in) | Y, | ||
| DOUBLE PRECISION,dimension(n,n),intent(out) | Fy | ||
| ) |
Here is the call graph for this function: