Kinematic simulation module. More...
Functions/Subroutines | |
| subroutine | position_kinematics () |
| Solves the position problem in terms of the degrees of freedom of the system (Partially taken from MBSLIM) | |
| subroutine | velocity_kinematics () |
| Solves the velocity problem in terms of the degrees of freedom of the system (Partially taken from MBSLIM) | |
| subroutine | acceleration_kinematics () |
| Solves the acceleration problem in terms of the degrees of freedom of the system (Partially taken from MBSLIM) | |
| subroutine | Model_Setup_Kinematics |
| Generic subroutine to set up the kinematics. | |
Detailed Description
Kinematic simulation module.
Function/Subroutine Documentation
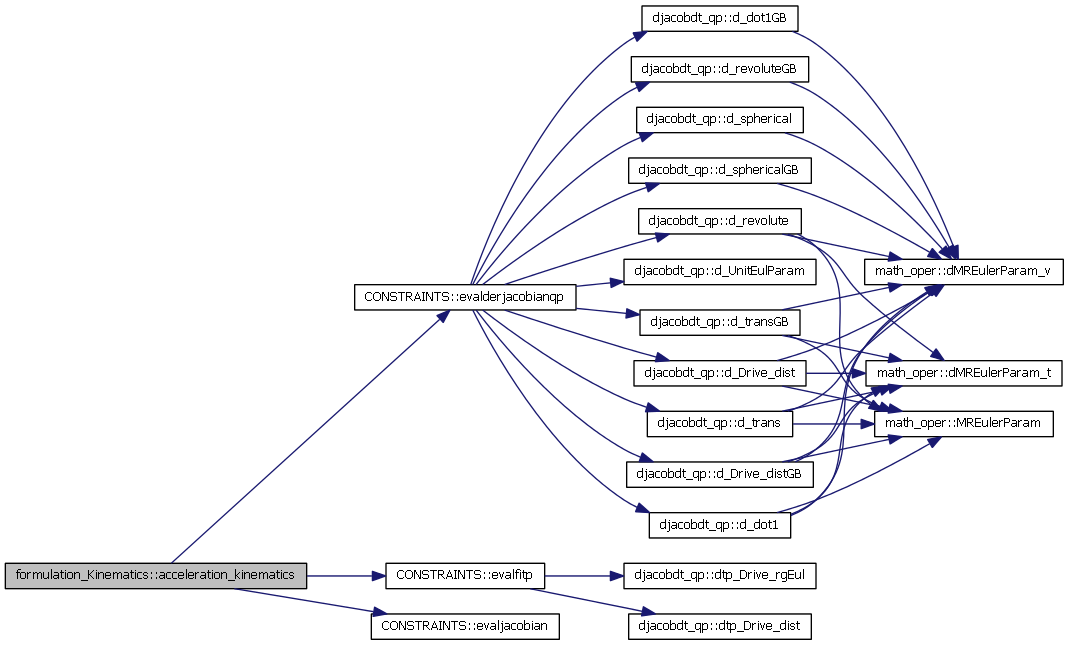
| subroutine formulation_Kinematics::acceleration_kinematics | ( | ) |
Solves the acceleration problem in terms of the degrees of freedom of the system (Partially taken from MBSLIM)
Here is the call graph for this function:
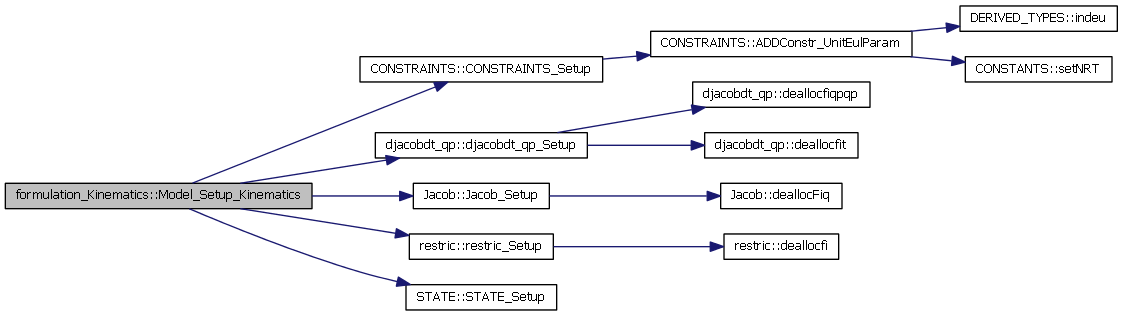
| subroutine formulation_Kinematics::Model_Setup_Kinematics | ( | ) |
Generic subroutine to set up the kinematics.
Here is the call graph for this function:
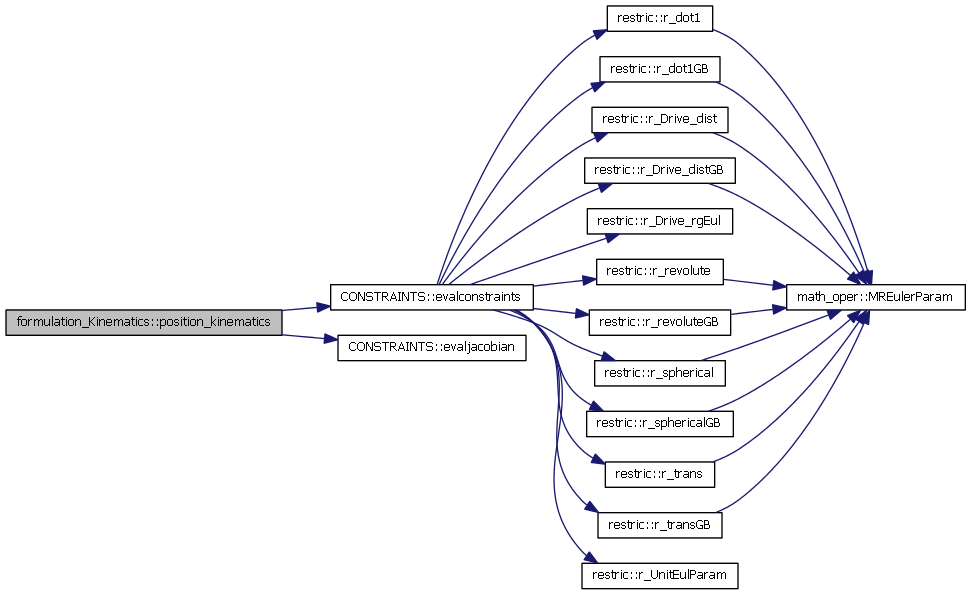
| subroutine formulation_Kinematics::position_kinematics | ( | ) |
Solves the position problem in terms of the degrees of freedom of the system (Partially taken from MBSLIM)
Here is the call graph for this function:
| subroutine formulation_Kinematics::velocity_kinematics | ( | ) |
Solves the velocity problem in terms of the degrees of freedom of the system (Partially taken from MBSLIM)
Here is the call graph for this function:

