Generalized forces module. More...
Functions/Subroutines | |
| subroutine, public | ADDforce_TSD (body1, body2, pt1, pt2, k, c, s0, handle) |
| Adds a linear TSD force to the model /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the TSD, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the TSD. /param s0 natural lenght of the TSD. | |
| subroutine, public | ADDforce_Bump (body1, body2, pt1, pt2, k, c, s0, handle) |
| Adds a linear Bump Stop force to the model. It is equivalent to a TSD force with only compression. /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the Bump, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the Bump. /param s0 natural lenght of the Bump. | |
| subroutine, public | ADDforce_TSDA (body1, body2, pt1, pt2, TSDA, TSDAs, TSDAsp, handle) |
| Adds a user provided TSDA force to the model /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the TSD, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the TSD. /param s0 natural lenght of the TSD. | |
| subroutine | ADDforce_genericTSDA (body1, body2, pt1, pt2, k, c, s0, kind, TSDA, TSDAs, TSDAsp, handle) |
| Adds a linear generic TSD/bump/TSDA force to the model. It's not a user subroutine, it is intended for the solver /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the TSD, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the TSD. /param s0 natural lenght of the TSD. /param kind kind of TSD, (TSD=1,BUMP=2,TSDA=3). /param TSDA,TSDAs,TSDAsp pointers to the TSDA subroutine and derivatives. The TSDA provices the force over the distance. | |
| subroutine, public | ADDforce_normal (body, pt_loc, km, cm, rad, hyster, handle) |
| Adds a linear normal contact force (Taken from MBSLIM) | |
| subroutine, public | ADDforce_tireBasic (kappac, alfac, mux, muy, handle) |
| Adds tire to a normal contact over a wheel: linear model with saturation ellipse. The rotation axis of the wheel is assumed to be coincident with the local vector (/0.d0,1.d0,0.d0/). Completely taken from MBSLIM: http://lim.ii.udc.es. | |
| subroutine, public | Modifyforce_TSDA (handle, k, c, s0) |
| subroutine, public | GETforce_TSDA (handle, fs, F2) |
| Returns the longitudinal and vectorial forces exerted by a linear generic TSD/bump/TSDA in the current time. /param handle handle to the TSDA force, returned by ADDforce_TSD, ADDforce_Bump or ADDforce_TSDA. /param fs longitudinal force exerted by the TSDA. /param F2 vectorial force exerted by the TSDA on the body2. The force exerted on the body1 is F1=-F2. | |
| subroutine, public | GETforce_normal (handle, mfn, Fn) |
| Returns the normal force exerted by normal force element in the current time. /param handle handle to the normal force, returned by ADDforce_normal. /param mfn longitudinal force exerted. /param Fn vectorial force exerted. | |
| subroutine, public | GETforce_tireBasic (handle, Ftire) |
| Returns the normal and lateral force exerted by tireBasic element in the current time. The normal component corresponds to the force_normal element associated to the tire. /param handle handle to the tire force, returned by ADDforce_tireBasic. /param Ftire vectorial force exerted. | |
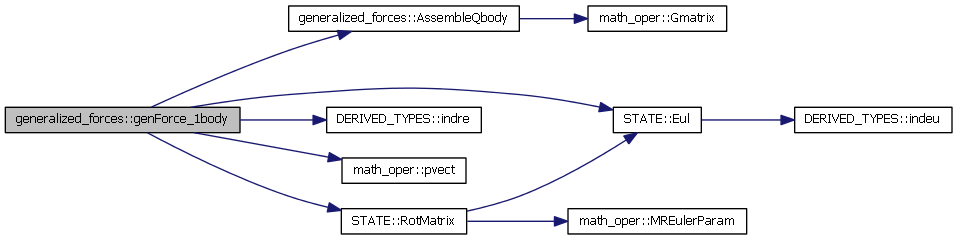
| subroutine, public | genForce_1body (body, pt_loc, F) |
| Introduces a generic force acting over one body of the model. /param body body over which the force acts. /param pt_loc local point in the body. /param F applied force in global coordinates. | |
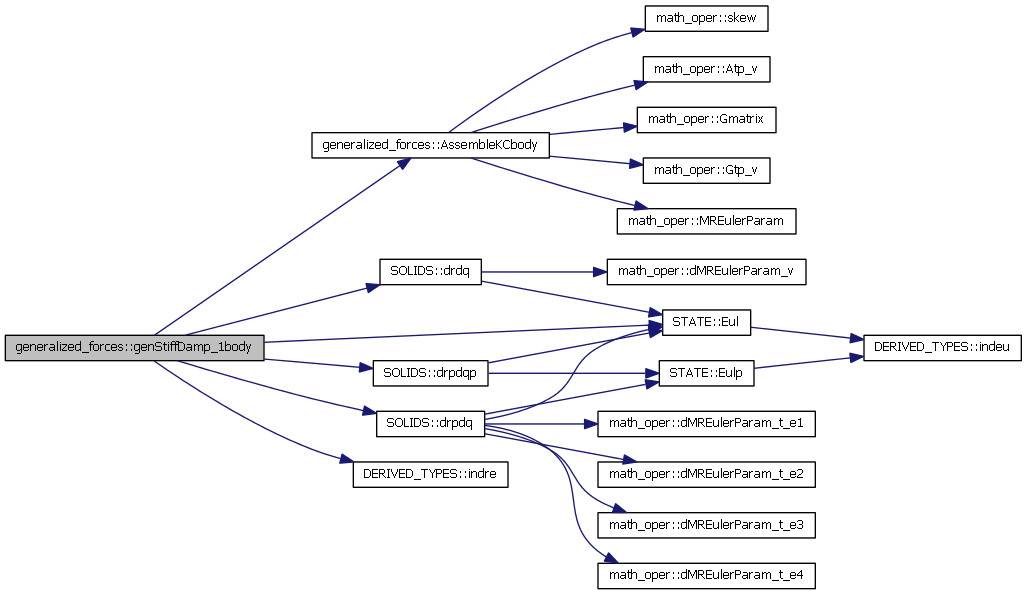
| subroutine | genStiffDamp_1body (body, pt_loc, F, dFdr, dFdrp) |
Introduces a generic stiffness damping term over one body of the model. /param body body over which the force acts. /param pt_loc local point in the body. /param F applied force in global coordinates. /param K elemental stiffness matrix, given by  . /param C elemental damping matrix, given by . /param C elemental damping matrix, given by  . . | |
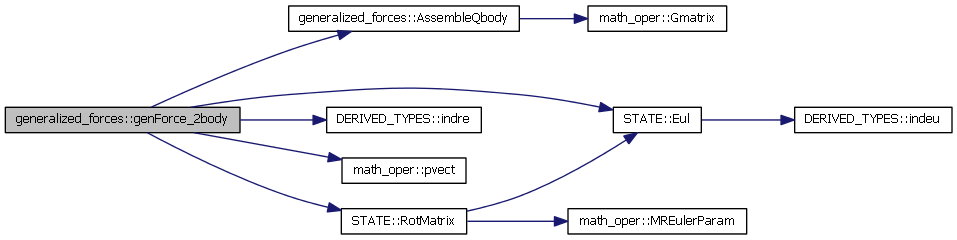
| subroutine | genForce_2body (body1, body2, pt1_loc, pt2_loc, F2) |
| Introduces a generic action/reaction force acting over two bodies of the model. /param body1,body2 bodies between which the force acts. /param pt1_loc,pt2_loc end points in the bodies given in local coordinates of body1 and body2 respectively. /param F1 value of the force over the body1, -F1 acts over body2. | |
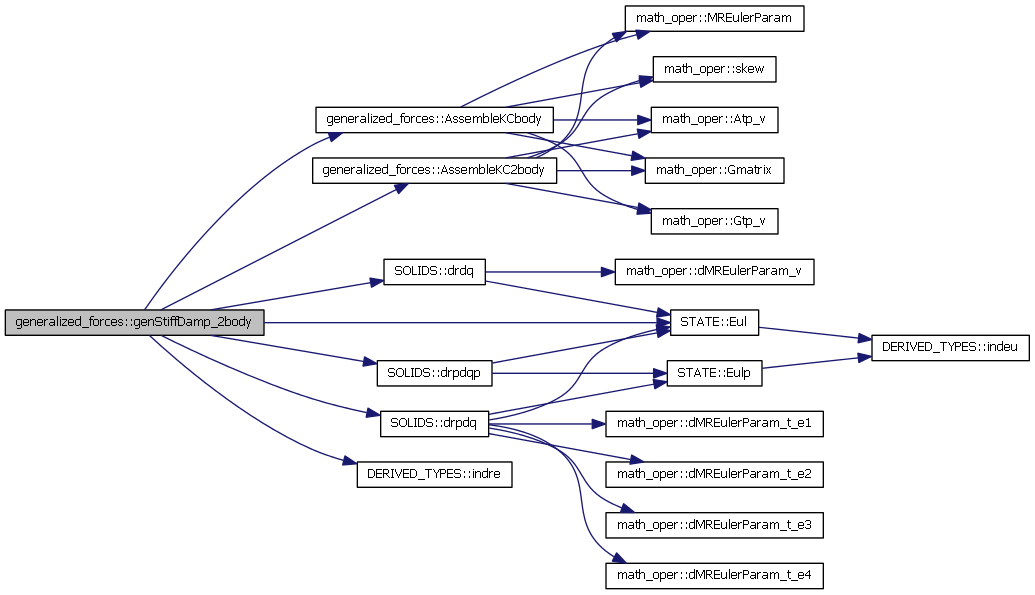
| subroutine | genStiffDamp_2body (body1, body2, pt1_loc, pt2_loc, F2, dF2dr1, dF2dr2, dF2dr1p, dF2dr2p) |
| Introduces a generic stiffness damping term over over two bodies of the model.one body of the model. /param body body over which the force acts. /param pt_loc local point in the body. /param F applied force in global coordinates. /param K elemental stiffness matrix, given by . /param C elemental damping matrix, given by . | |
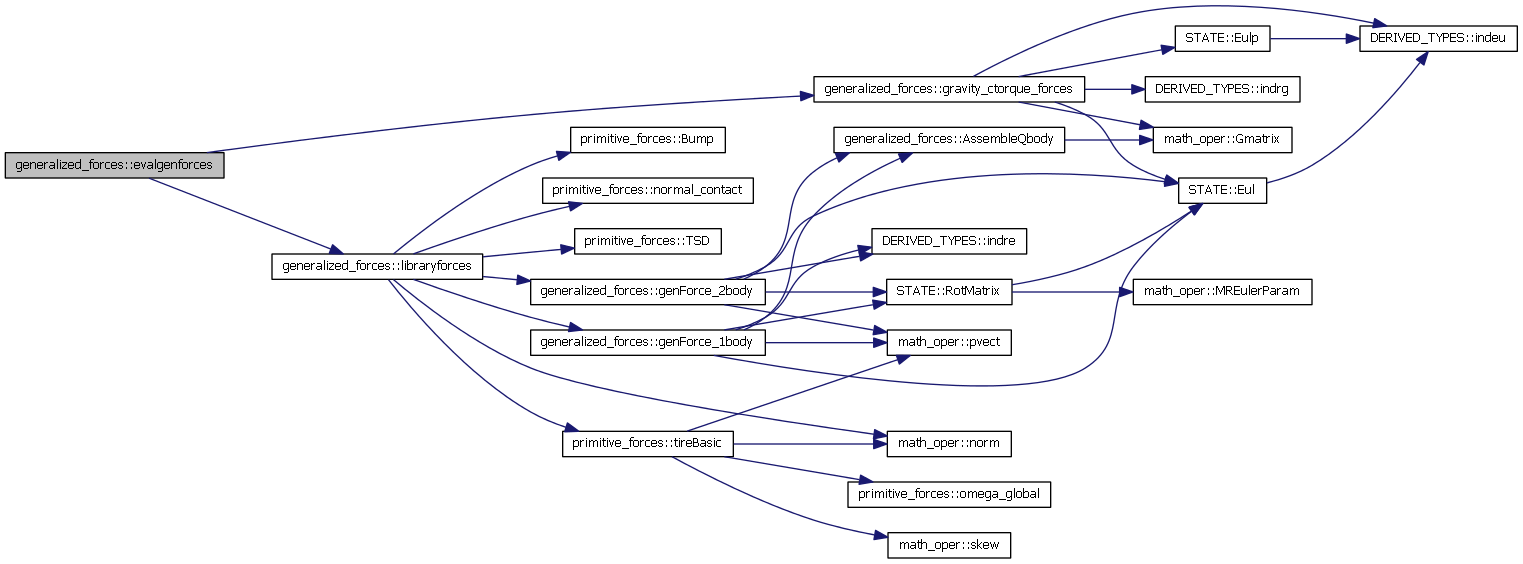
| subroutine, public | evalgenforces (t) |
| Subroutine to evaluate the generalized forces of the system. | |
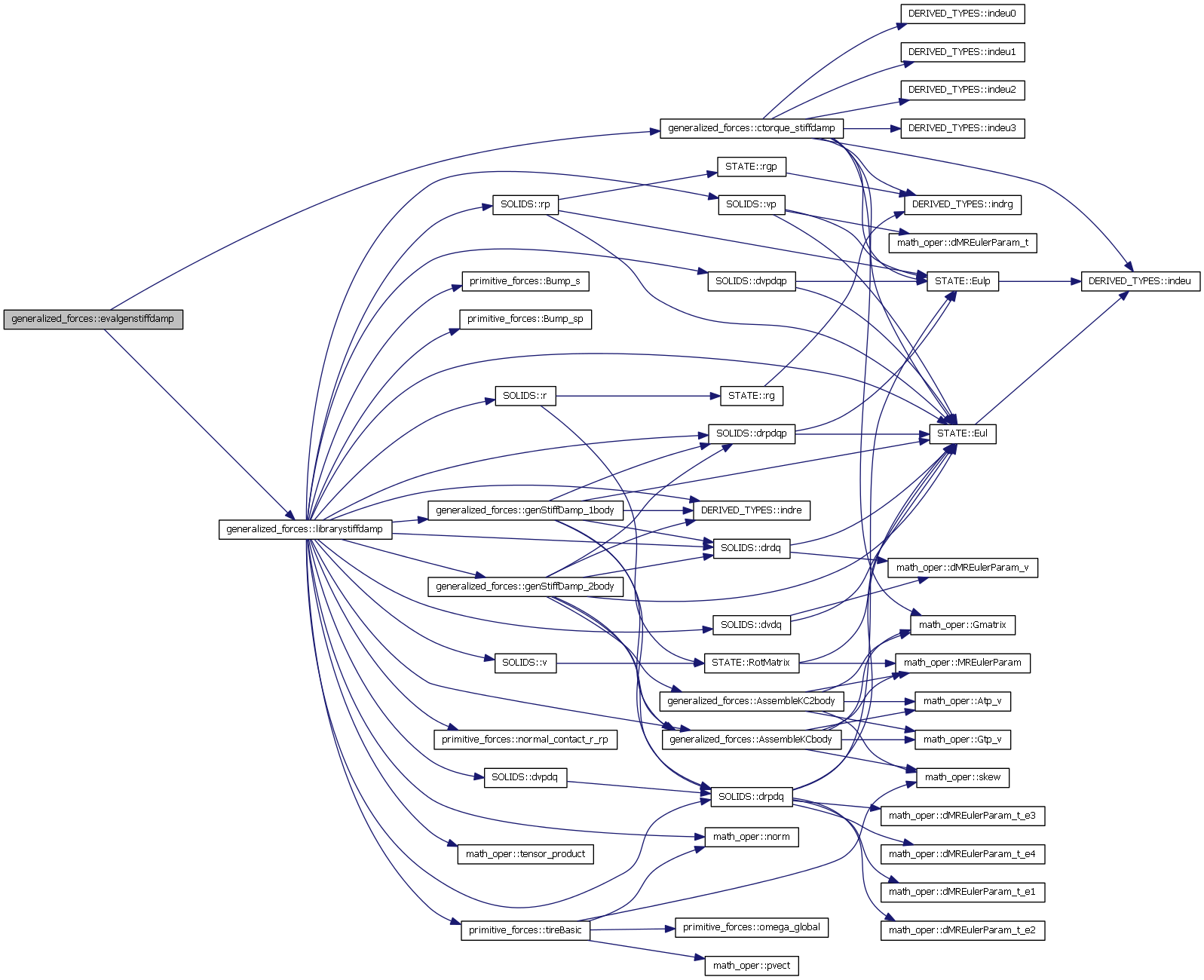
| subroutine, public | evalgenstiffdamp (t) |
| Subroutine to evaluate the generalized stiffness and damping of the system. | |
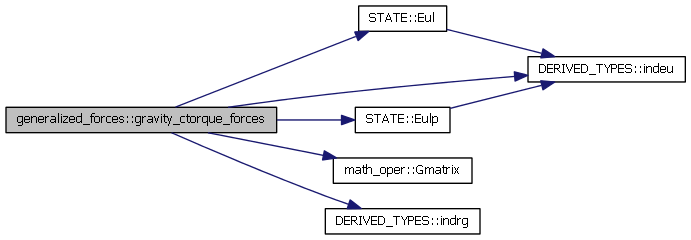
| subroutine | gravity_ctorque_forces |
| Subroutine to evaluate the gravity forces of the system. It's not a user routine. | |
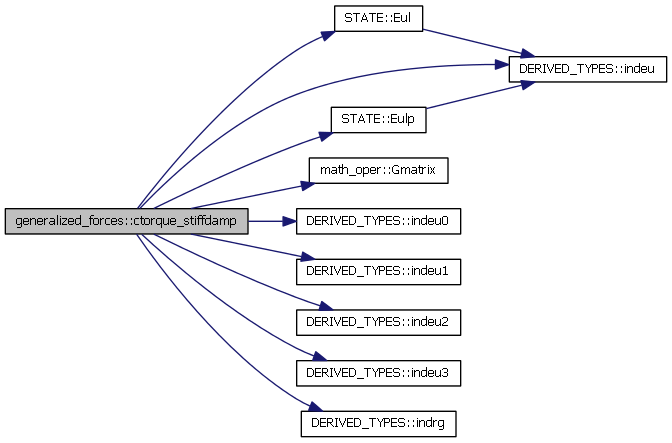
| subroutine | ctorque_stiffdamp |
| Subroutine to evaluate the gravity stiffness and damping of the system. It's not a user routine. | |
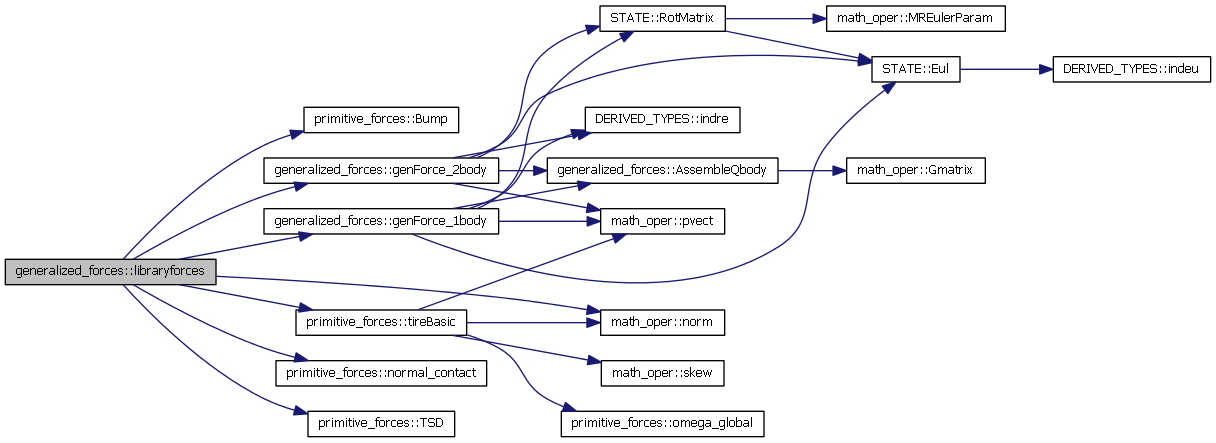
| subroutine | libraryforces (t) |
| Subroutine to evaluate the library forces of the system. | |
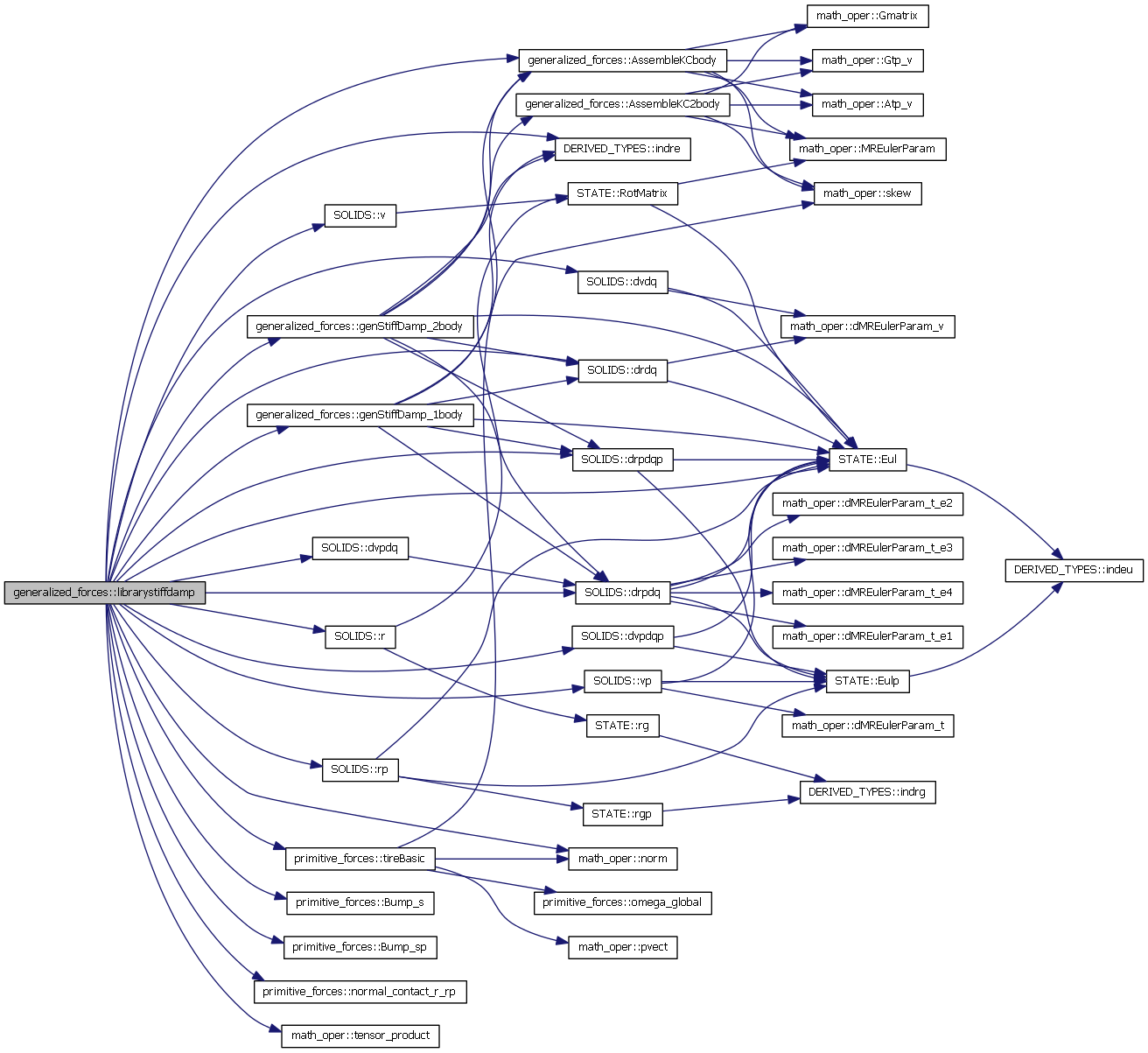
| subroutine | librarystiffdamp (t) |
| Subroutine to evaluate the library stiffness and damping of the system. | |
| subroutine | AssembleQbody (n, F, p, Q) |
| Subroutine to form the local generalized force over one body Function to get the generalized force of one body when torque, force and Euler parameters of this body are given. | |
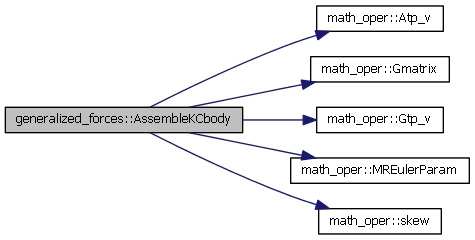
| subroutine | AssembleKCbody (pt, p, F, dFdq, dFdqp, K, C) |
| Subroutine to form the local generalized stiffness and damping over one body. | |
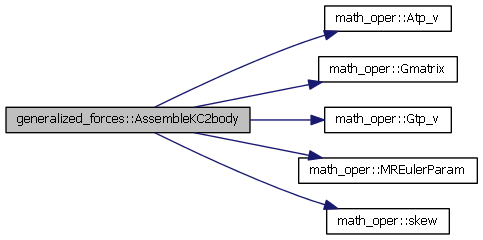
| subroutine | AssembleKC2body (pt1, pt2, p1, p2, F2, dF2dq1, dF2dq2, dF2dqp1, dF2dqp2, K, C) |
| Subroutine to form the local generalized stiffness and damping over two bodies. | |
| subroutine, public | generalized_forces_Setup |
| Generalized forces module setup. | |
Variables | |
| REAL(8), dimension(:), allocatable, public | Qgen |
| REAL(8), dimension(:,:), allocatable, public | PROTECTED |
| REAL(8), dimension(:,:), allocatable, public | Kgen |
| REAL(8), dimension(:,:), allocatable, public | Cgen |
| REAL(8), dimension(:), allocatable | Qgrav |
| REAL(8), dimension(:,:), allocatable | Kgrav |
| REAL(8), dimension(:,:), allocatable | Cgrav |
| INTEGER | nforce_TSDA = 0 |
| INTEGER | nforce_normal = 0 |
| INTEGER | nforce_tirebasic = 0 |
| TYPE(typeforce_TSDA), dimension(:), allocatable | force_TSDA |
| TYPE(typeforce_normal), dimension(:), allocatable | force_normal |
| TYPE(typeforce_tirebasic), dimension(:), allocatable | force_tirebasic |
| INTEGER, parameter | kindTSD = 1 |
| INTEGER, parameter | kindBUMP = 2 |
| INTEGER, parameter | kindTSDA = 3 |
Detailed Description
Generalized forces module.
This module:
1)Add forces to the model.
Function/Subroutine Documentation
| subroutine,public generalized_forces::ADDforce_Bump | ( | INTEGER,intent(in) | body1, |
| INTEGER,intent(in) | body2, | ||
| REAL(8),dimension(3),intent(in) | pt1, | ||
| REAL(8),dimension(3),intent(in) | pt2, | ||
| REAL(8),intent(in) | k, | ||
| REAL(8),intent(in) | c, | ||
| REAL(8),intent(in) | s0, | ||
| INTEGER,intent(out),optional | handle | ||
| ) |
Adds a linear Bump Stop force to the model. It is equivalent to a TSD force with only compression. /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the Bump, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the Bump. /param s0 natural lenght of the Bump.

| subroutine generalized_forces::ADDforce_genericTSDA | ( | INTEGER,intent(in) | body1, |
| INTEGER,intent(in) | body2, | ||
| REAL(8),dimension(3),intent(in) | pt1, | ||
| REAL(8),dimension(3),intent(in) | pt2, | ||
| REAL(8),intent(in) | k, | ||
| REAL(8),intent(in) | c, | ||
| REAL(8),intent(in) | s0, | ||
| INTEGER,intent(in) | kind, | ||
| PROCEDURE(callback_TSDA),optional | TSDA, | ||
| PROCEDURE(callback_TSDA),optional | TSDAs, | ||
| PROCEDURE(callback_TSDA),optional | TSDAsp, | ||
| INTEGER,intent(out),optional | handle | ||
| ) |
Adds a linear generic TSD/bump/TSDA force to the model. It's not a user subroutine, it is intended for the solver /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the TSD, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the TSD. /param s0 natural lenght of the TSD. /param kind kind of TSD, (TSD=1,BUMP=2,TSDA=3). /param TSDA,TSDAs,TSDAsp pointers to the TSDA subroutine and derivatives. The TSDA provices the force over the distance.
| subroutine,public generalized_forces::ADDforce_normal | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc, | ||
| REAL(8),intent(in) | km, | ||
| REAL(8),intent(in) | cm, | ||
| REAL(8),intent(in) | rad, | ||
| REAL(8),intent(in) | hyster, | ||
| INTEGER,intent(out),optional | handle | ||
| ) |
Adds a linear normal contact force (Taken from MBSLIM)
- Parameters:
-
body solid to apply the force. km,cm stiffness and damping constants rad radius of the contact. hyster hysteresis parameter. It varies between 0 (no dissipation at return) and 1 (100% disipation at return).
| subroutine,public generalized_forces::ADDforce_tireBasic | ( | REAL(8),intent(in) | kappac, |
| REAL(8),intent(in) | alfac, | ||
| REAL(8),intent(in) | mux, | ||
| REAL(8),intent(in) | muy, | ||
| INTEGER,intent(out),optional | handle | ||
| ) |
Adds tire to a normal contact over a wheel: linear model with saturation ellipse. The rotation axis of the wheel is assumed to be coincident with the local vector (/0.d0,1.d0,0.d0/). Completely taken from MBSLIM: http://lim.ii.udc.es.
- Parameters:
-
kappac,alfac pseudodeslizamientos crÃticos longitudinal y lateral. mux,muy coeficientes de fricción máximos en "x" e "y" que nos definen la elipse de adherencia del modelo.
| subroutine,public generalized_forces::ADDforce_TSD | ( | INTEGER,intent(in) | body1, |
| INTEGER,intent(in) | body2, | ||
| REAL(8),dimension(3),intent(in) | pt1, | ||
| REAL(8),dimension(3),intent(in) | pt2, | ||
| REAL(8),intent(in) | k, | ||
| REAL(8),intent(in) | c, | ||
| REAL(8),intent(in) | s0, | ||
| INTEGER,intent(out),optional | handle | ||
| ) |
Adds a linear TSD force to the model /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the TSD, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the TSD. /param s0 natural lenght of the TSD.

| subroutine,public generalized_forces::ADDforce_TSDA | ( | INTEGER,intent(in) | body1, |
| INTEGER,intent(in) | body2, | ||
| REAL(8),dimension(3),intent(in) | pt1, | ||
| REAL(8),dimension(3),intent(in) | pt2, | ||
| PROCEDURE(callback_TSDA) | TSDA, | ||
| PROCEDURE(callback_TSDA),optional | TSDAs, | ||
| PROCEDURE(callback_TSDA),optional | TSDAsp, | ||
| INTEGER,intent(out),optional | handle | ||
| ) |
Adds a user provided TSDA force to the model /param body1,body2 bodies between which the force acts. /param pt1,pt2 end points in the bodies for the TSD, expresed in the local reference frames of the bodies. /param k,c stiffness and damping coefficients of the TSD. /param s0 natural lenght of the TSD.

| subroutine generalized_forces::AssembleKC2body | ( | REAL(8),dimension(3),intent(in) | pt1, |
| REAL(8),dimension(3),intent(in) | pt2, | ||
| REAL(8),dimension(4),intent(in) | p1, | ||
| REAL(8),dimension(4),intent(in) | p2, | ||
| REAL(8),dimension(3),intent(in) | F2, | ||
| REAL(8),dimension(3,7),intent(in) | dF2dq1, | ||
| REAL(8),dimension(3,7),intent(in) | dF2dq2, | ||
| REAL(8),dimension(3,7),intent(in) | dF2dqp1, | ||
| REAL(8),dimension(3,7),intent(in) | dF2dqp2, | ||
| REAL(8),dimension(14,14),intent(out) | K, | ||
| REAL(8),dimension(14,14),intent(out) | C | ||
| ) |
Subroutine to form the local generalized stiffness and damping over two bodies.
- Parameters:
-
pt1 local points of the bodies. F global force acting on the given body. dFdq derivative of the force wrt the generalized coordinates of the body. dFdqp derivative of the force wrt the generalized velocities of the body. p1,p2 Euler parameters of the given bodies. K,C elemental stiffness and damping matrices
| subroutine generalized_forces::AssembleKCbody | ( | REAL(8),dimension(3),intent(in) | pt, |
| REAL(8),dimension(4),intent(in) | p, | ||
| REAL(8),dimension(3),intent(in) | F, | ||
| REAL(8),dimension(3,7),dimension(3,7),intent(in) | dFdq, | ||
| REAL(8),dimension(3,7),dimension(3,7),intent(in) | dFdqp, | ||
| REAL(8),dimension(7,7),intent(out) | K, | ||
| REAL(8),dimension(7,7),intent(out) | C | ||
| ) |
Subroutine to form the local generalized stiffness and damping over one body.
- Parameters:
-
pt local point of the body. F global force acting on the given body. dFdq derivative of the force wrt the generalized coordinates of the body. dFdqp derivative of the force wrt the generalized velocities of the body. p Euler parameters of the given body. K,C elemental stiffness and damping matrices
| subroutine generalized_forces::AssembleQbody | ( | REAL(8),dimension(3),intent(in) | n, |
| REAL(8),dimension(3),intent(in) | F, | ||
| REAL(8),dimension(4),intent(in) | p, | ||
| REAL(8),dimension(7),intent(out) | Q | ||
| ) |
Subroutine to form the local generalized force over one body Function to get the generalized force of one body when torque, force and Euler parameters of this body are given.
- Parameters:
-
n local torque acting on the given body. F global force acting on the given body. p Euler parameters of the given body. Q Euler parameters of the given body.

| subroutine generalized_forces::ctorque_stiffdamp | ( | ) |
Subroutine to evaluate the gravity stiffness and damping of the system. It's not a user routine.
| subroutine,public generalized_forces::evalgenforces | ( | REAL(8),intent(in) | t | ) |
Subroutine to evaluate the generalized forces of the system.
| subroutine,public generalized_forces::evalgenstiffdamp | ( | REAL(8),intent(in) | t | ) |
Subroutine to evaluate the generalized stiffness and damping of the system.
| subroutine,public generalized_forces::generalized_forces_Setup | ( | ) |
Generalized forces module setup.
| subroutine,public generalized_forces::genForce_1body | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc, | ||
| REAL(8),dimension(3),intent(in) | F | ||
| ) |
Introduces a generic force acting over one body of the model. /param body body over which the force acts. /param pt_loc local point in the body. /param F applied force in global coordinates.
| subroutine generalized_forces::genForce_2body | ( | INTEGER,intent(in) | body1, |
| INTEGER,intent(in) | body2, | ||
| REAL(8),dimension(3),intent(in) | pt1_loc, | ||
| REAL(8),dimension(3),intent(in) | pt2_loc, | ||
| REAL(8),dimension(3),intent(in) | F2 | ||
| ) |
Introduces a generic action/reaction force acting over two bodies of the model. /param body1,body2 bodies between which the force acts. /param pt1_loc,pt2_loc end points in the bodies given in local coordinates of body1 and body2 respectively. /param F1 value of the force over the body1, -F1 acts over body2.
| subroutine generalized_forces::genStiffDamp_1body | ( | INTEGER,intent(in) | body, |
| REAL(8),dimension(3),intent(in) | pt_loc, | ||
| REAL(8),dimension(3),intent(in) | F, | ||
| REAL(8),dimension(3,3),intent(in) | dFdr, | ||
| REAL(8),dimension(3,3),intent(in) | dFdrp | ||
| ) |
Introduces a generic stiffness damping term over one body of the model. /param body body over which the force acts. /param pt_loc local point in the body. /param F applied force in global coordinates. /param K elemental stiffness matrix, given by . /param C elemental damping matrix, given by .
| subroutine generalized_forces::genStiffDamp_2body | ( | INTEGER,intent(in) | body1, |
| INTEGER,intent(in) | body2, | ||
| REAL(8),dimension(3),intent(in) | pt1_loc, | ||
| REAL(8),dimension(3),intent(in) | pt2_loc, | ||
| REAL(8),dimension(3),intent(in) | F2, | ||
| REAL(8),dimension(3,3),intent(in) | dF2dr1, | ||
| REAL(8),dimension(3,3),intent(in) | dF2dr2, | ||
| REAL(8),dimension(3,3),intent(in) | dF2dr1p, | ||
| REAL(8),dimension(3,3),intent(in) | dF2dr2p | ||
| ) |
Introduces a generic stiffness damping term over over two bodies of the model.one body of the model. /param body body over which the force acts. /param pt_loc local point in the body. /param F applied force in global coordinates. /param K elemental stiffness matrix, given by . /param C elemental damping matrix, given by .
| subroutine,public generalized_forces::GETforce_normal | ( | INTEGER,intent(in) | handle, |
| REAL(8),intent(out),optional | mfn, | ||
| REAL(8),dimension(3),intent(out),optional | Fn | ||
| ) |
Returns the normal force exerted by normal force element in the current time. /param handle handle to the normal force, returned by ADDforce_normal. /param mfn longitudinal force exerted. /param Fn vectorial force exerted.
| subroutine,public generalized_forces::GETforce_tireBasic | ( | INTEGER,intent(in) | handle, |
| REAL(8),dimension(3),intent(out) | Ftire | ||
| ) |
Returns the normal and lateral force exerted by tireBasic element in the current time. The normal component corresponds to the force_normal element associated to the tire. /param handle handle to the tire force, returned by ADDforce_tireBasic. /param Ftire vectorial force exerted.
| subroutine,public generalized_forces::GETforce_TSDA | ( | INTEGER,intent(in) | handle, |
| REAL(8),intent(out),optional | fs, | ||
| REAL(8),dimension(3),intent(out),optional | F2 | ||
| ) |
Returns the longitudinal and vectorial forces exerted by a linear generic TSD/bump/TSDA in the current time. /param handle handle to the TSDA force, returned by ADDforce_TSD, ADDforce_Bump or ADDforce_TSDA. /param fs longitudinal force exerted by the TSDA. /param F2 vectorial force exerted by the TSDA on the body2. The force exerted on the body1 is F1=-F2.
| subroutine generalized_forces::gravity_ctorque_forces | ( | ) |
Subroutine to evaluate the gravity forces of the system. It's not a user routine.
| subroutine generalized_forces::libraryforces | ( | REAL(8),intent(in) | t | ) |
Subroutine to evaluate the library forces of the system.
| subroutine generalized_forces::librarystiffdamp | ( | REAL(8),intent(in) | t | ) |
Subroutine to evaluate the library stiffness and damping of the system.
| subroutine,public generalized_forces::Modifyforce_TSDA | ( | INTEGER,intent(in) | handle, |
| REAL(8),intent(in),optional | k, | ||
| REAL(8),intent(in),optional | c, | ||
| REAL(8),intent(in),optional | s0 | ||
| ) |
Variable Documentation
| REAL(8),dimension(:,:),allocatable,public generalized_forces::Cgen |
| REAL(8),dimension(:,:),allocatable generalized_forces::Cgrav |
| TYPE(typeforce_normal),dimension(:),allocatable generalized_forces::force_normal |
| TYPE(typeforce_tirebasic),dimension(:),allocatable generalized_forces::force_tirebasic |
| TYPE(typeforce_TSDA),dimension(:),allocatable generalized_forces::force_TSDA |
| REAL(8),dimension(:,:),allocatable,public generalized_forces::Kgen |
| REAL(8),dimension(:,:),allocatable generalized_forces::Kgrav |
| INTEGER,parameter generalized_forces::kindBUMP = 2 |
| INTEGER,parameter generalized_forces::kindTSD = 1 |
| INTEGER,parameter generalized_forces::kindTSDA = 3 |
| INTEGER generalized_forces::nforce_normal = 0 |
| INTEGER generalized_forces::nforce_tirebasic = 0 |
| INTEGER generalized_forces::nforce_TSDA = 0 |
| REAL(8),dimension(:,:),allocatable,public generalized_forces::PROTECTED |
| REAL(8),dimension(:),allocatable,public generalized_forces::Qgen |
| REAL(8),dimension(:),allocatable generalized_forces::Qgrav |
